Arm Rehabilitation Robotics
Our Rehabilitation Exoskeletons:
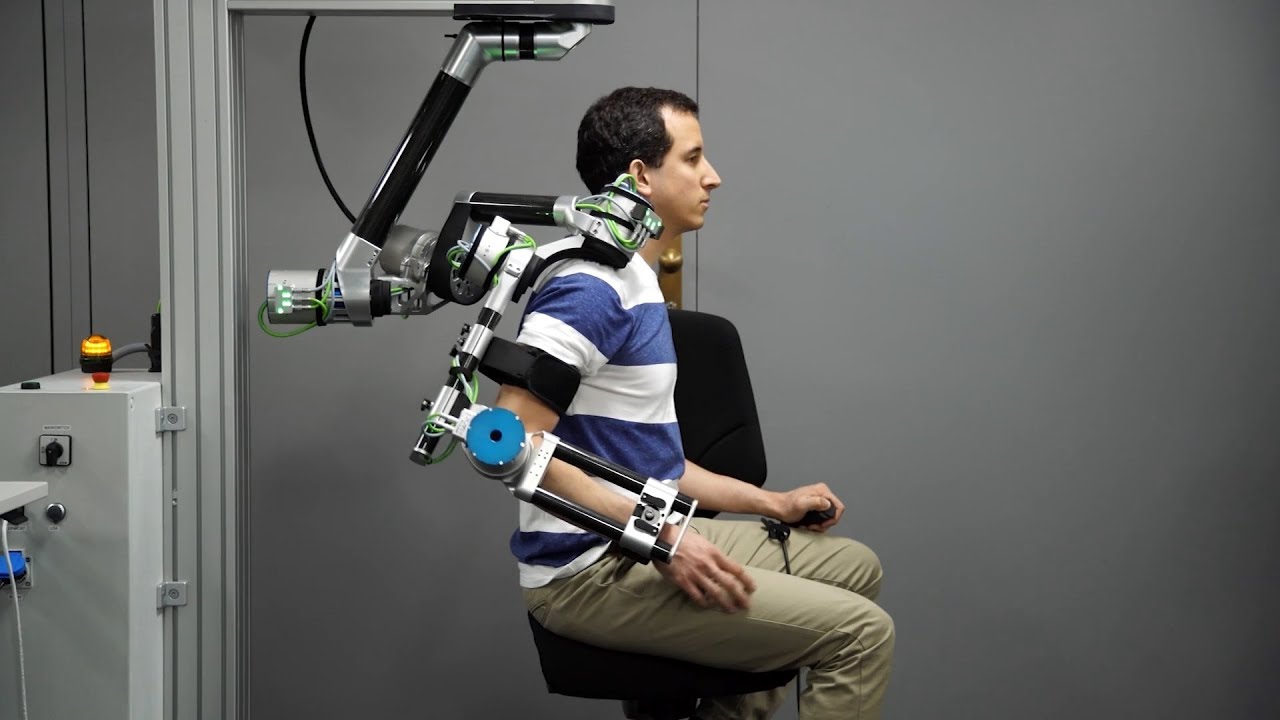
Rehabilitation robots are specifically designed to assist, guide and assess a patient's movements during therapy. Based on more than a decade of experience in building exoskeletons for upper-limb rehabilitation we developed our latest exoskeleton ANYexo. This robot uses lightweight design, series elastic actuation, and innovative kinematics that enable the robot to interact with patient’s movements to train almost all activities of daily living.
Contact
Collaborators
- external page University Hospital The Balgrist, Zurich
- external page University Children's Hospital Zurich
- external page Cereneo, Vitznau
- external page Klinik Lengg, Zurich
- external page Rehaklinik Zihlschlacht
- external page Gesundheitszentrum Bad Wimpfen
- Robotic Systems Lab (RSL)
- external page Hocoma AG
Over 13.7 million people suffer a stroke each year. Around two-thirds of the stroke survivors are left with a partial paresis of the upper limbs. Long-term, highly individual, high-intensity therapy can help these patients to recover partly or even fully from the lost functionality. Robots succeeded in relieving the therapists not only from physical work, but also from rather repetitive and cognitively less demanding tasks. However, robot-assisted therapy is still performed in a one-to-one manner, as the therapist needs to individualize the therapy to the patient's needs.
We anticipate a big open potential of rehabilitation robots to increase the financial efficiency of therapy, with the objective to provide more high-quality training to patients with the given health care resources. To address this we aim to:
- Develop a robotic system that can offer meaningful therapy to a broad range of patients by: allowing for highly dynamic movements, covering all relevant activities of daily living (ADL), and including body proximal movements. Further, the robot should provide higher safety during unsupervised operation by augmented patient observation and provide comfort for longer therapy sessions.
Click to learn more about ANYexo
- Develop novel therapy strategies that streamline the therapist’s time and expertise to improve the information flow between patient, robot and therapist. This includes the design of assistance controllers, multi-modal therapist and patient feedback, intelligent task and game generation and much more.
Click to learn more about SIESTA
We summarize these sub-projects under the joint vision of a Partially Unsupervised Rehabilitation Robot for Efficient Therapy (PURE).
PURE – A Partially Unsupervised Rehabilitation Robot for Efficient Therapy
Studies indicate that a higher amount of therapy has to be provided to patients for an increased rehabilitation outcome. Demographic ageing and financial resources of the health care system put a constraint to more intensive therapy if the current technology is used. Robots have the potential to solve this issue by relieving the therapists not only from physical work, but also from rather repetitive and cognitively less demanding tasks. With such robotic tools therapists can effectively train multiple patients in parallel. This will lead to more training time per patient at the same therapist effort.

Previous Projects
ARMin V

Robots are applied in therapy of stroke patients to restore lost motor function. Over the past years, the use of robots in therapy has been constantly increasing: Robots enable high intensity training through an increased training duration and a large number of movement repetitions, while the therapists are relieved from physical work.
In this project, we want to develop new therapy concepts that will increase the usability of the ARMin robot. In return, these new concepts are believed to tailor increased therapy outcomes.
ChARMin
Children with neurological disorders (e.g. cerebral palsy) often show an impairment of their arm motor function, affecting their independence and participation in daily life. Intensive rehabilitation training with active participation is important to trigger neuroplasticity in order to recover and learn motor functions. We are developing a pediatric version of the ARMin rehabilitation robot, called the children ARMin (ChARMin).
ChARMin can is aimed for children aged 5 to 18 years. The wide size ranges within this age group and the heterogeneity within the neurological disorders result in challenging requirement for the design of the new robot. This includes a high level of adjustability, increased safety for children, reduced joint friction and a high backdrivability.