Active Knee Prosthetics
We investigate how above-knee amputees can best control an active prosthetic leg. We aim to replicate physiological behavior in a prothetic device, in particular joint stiffness, and we use control strategies that use residual body motion to control the prosthesis. Furthermore, sensory substitution is used to supply the amputee with missing sensory information.
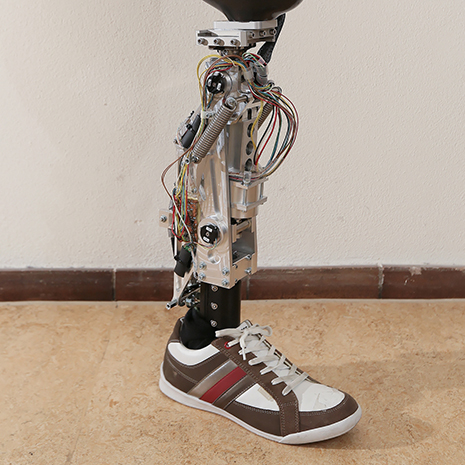
We control the motion of an active transfemoral prosthesis from residual body motion using our experimental setup (Fig. 1). Additionally, we investigate artificial sensory feedback to enhance perception of the amputees to facilitate control.
We have built a tethered prototype (Fig. 1) that allows us to test different control strategies with amputee subjects. Our prototype uses parallel springs and series elastic elements to fulfill the high requirements in terms of moment generation and force control that are necessary to test various controllers for different locomotor activities.

Note: The project on active knee prosthetics is continued at the Rehabiliation Engineering Lab of Prof. Roger Gassert at ETH Zurich and the Delft Biorobotics Group of Prof. Heike Vallery at TU Delft. Please contact or for any questions.
Subprojects

Sensory Substitution

Lower-limb amputation results in irreversible damage of the neuromuscular and skeletal system and tasks like maintaining balance or walking symmetrically become much more challenging. As the central nervous system is able to learn and to change, it is possible to provide additional artificial information that can be integrated into the human sensorimotor control loop, for example to facilitate postural control.