Sensory Substitution
Lower-limb amputation results in irreversible damage of the neuromuscular and skeletal system and tasks like maintaining balance or walking symmetrically become much more challenging. As the central nervous system is able to learn and to change, it is possible to provide additional artificial information that can be integrated into the human sensorimotor control loop, for example to facilitate postural control.

One method to supply information is to exploit a sensation called "tactile phi phenomenon", which has already been used to display sensory feedback from artificial hands. This sensation is elicited when two closely located points on the skin, e.g. on the lower back, are simultaneously stimulated at high frequencies, e.g. by electrotactile stimulation. Instead two distinct stimuli, only one single stimulus between the two points is felt. By changing relative intensities of the two stimuli, it is also possible to evoke a moving sensation in between the two points. In collaboration with the external pageAI Lab of the University of Zurich we are using this moving sensation to provide information on the location of the so-called Center of Pressure (CoP), the point where the ground reaction force attacks under the foot. It is hypothesized that the timely displacement of the CoP is one important strategy in human posture control. Substituting missing sensory information on the location of the CoP may improve lower-limb amputees' ability to use the prosthetic leg in balance control.
Preliminary Results
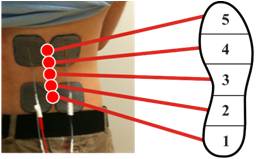
In first experiments we showed that the spatial resolution of the two-channel display is high enough to allow recognition of different static and dynamic movement patterns associated with discrete regions under the foot (Fig. 1). We are currently investigating whether the feedback information is suitable to improve balance control. Besides the location of the CoP, other feedback variables like the knee angle are possible. In colllaboration with our clinical partner in Zurich we are evaluating different feedback configurations for standing (Fig. 2) and walking.
Publications
Pagel, A.H. Arieta, R. Riener, H. Valleryexternal pageEffects of sensory augmentation on postural control and gait symmetry of transfemoral amputees: a case description
Medical & biological engineering & computing (2015): 1-11.
A. Pagel, R. Riener, H. Vallery
Substitute feedback to improve balance control of transfemoral amputees
Biomed Tech 2011, Freiburg, Germany, 27 September 2011 - 30 September 2011, Volume 56, Issue s1, 1–6
Funding
The Swiss National Science Foundation through the external pageNational Centre of Competence in Research (NCCR) Robotics
The external pageGottfried and Julia Bangerter-Rhyner Stiftung
The ETH research grant ETHIIRA (ETH Independent Investigators' Research Awards)