Gait Rehabilitation Robot (Lokomat)
Current research of our group focuses on improving the effectiveness of robot-aided gait training in three ways. First, patient-cooperative control is used so that the robot adapts its behavior to the patient´s needs. Second, additional degrees of freedom for the robotic orthosis allow a more natural walking pattern and last a virtual reality environment is used to maximize the patient’s motivation.
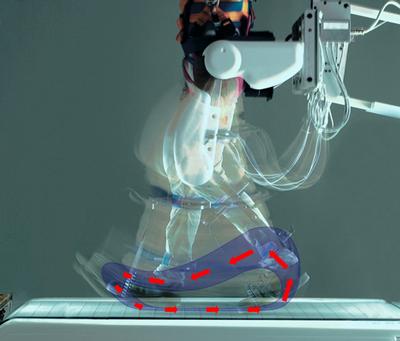
The Lokomat consists of four main components, Body Weight Support system, Orthoses, Treadmill and Virtual Reality environment. Above the patient a Body Weight Support system is installed, which enables patients to walk, even if they are too weak to hold their full body weight. For guidance and actuation of the leg movement, Orthoses around the legs are used. The Lokomat version that is currently in clinical use has two actuated joints per leg, one for the hip and one for the knee flexion (see image on the right). Thus, it allows movements in the sagittal plane only. The natural gait pattern includes also movements of the hip joint in the coronal plane (ab-/adduction) and lateral movements of the pelvis to displace the body's center of mass over the weight-bearing leg. These movements are crucial for postural control. Because of the restricted movement in the Lokomat, training of balance is currently not possible.
The aim of this project is to modify hardware and software of the Lokomat robot to achieve a more comfortable and natural gait pattern and to enable patients training balance during walking.
Ideally, the robot should provide as much freedom as possible to the patient and supports him or her just as much as needed. To optimize conditions for motor relearning, patients need to experience the results of their efforts and move as freely as possible – the robot needs to “get out of the way”. However, at the same time, the robot has to provide at least the amount of support that the patient needs to maintain stable walking.
Funding
Commission for Technology and Innovation (CTI) of Switzerland.