Fabian Just
Dr. Fabian Just is a postdoctoral researcher focused on controls, machine learning, and rehabilitation robotics. He is developing the fifth version of ARMin, an arm rehabilitation robot specifically designed with intelligent control strategies to enhance the capabilities of therapists.
Fabian received a M.Sc. degree in electrical and computer engineering from Purdue University (IN,USA) in 2013 as well as a M.Sc. degree in automatic control from Ruhr-University Bochum (Germany) in 2014. From 2014 to 2015 he worked at the institute of automation and computer control at Ruhr-University Bochum as a research and teaching assistant.
During his studies, Fabian received scholarships of the Foundation of German Business, the German Academic Exchange Service (DAAD) and the German Employer Association. He holds the Fastest Graduation Award of Ruhr-University Bochum as well as the Research In Motion Award for being the best graduate of the school of electrical engineering at Ruhr-University Bochum. For his PhD work on ARMin 5, Fabian was awarded with the 1st place at the AUTOMED (VDE/VDI) 2018 in Villingen-Schwenningen (Germany), the 1st place at the Jiao Tong University Academic Forum in Shanghai (China), and the 1st place at the international neuro rehabilitation symposium in Hertenstein (Switzerland).
Patents
F. Just, R. Riener, G. Rauter
System for handling an object to be displaced by two influencers, Patent Application, 2017
Publications
F. Just, Ö. Özen, S. Tortora, V. Klamroth-Marganska, R. Riener, G. Rauter
external pageHuman arm weight compensation in rehabilitation robotics: efficacy of three distinct methods
Journal of NeuroEngineering and Rehabilitation 17, 2020
F. Just, Ö. Özen, P. Bösch, H. Bobrovsky, R. Riener, G. Rauter
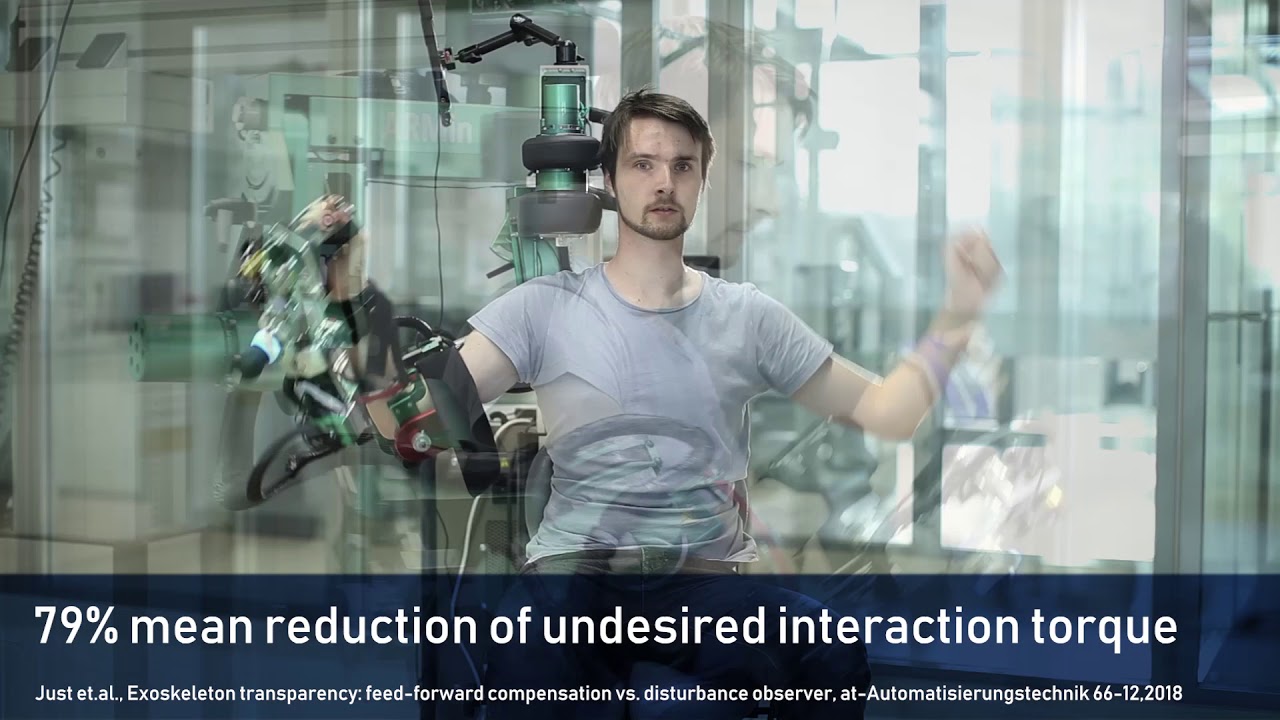
Exoskeleton transparency: feed-forward compensation vs. disturbance observer
at-Automatisierungstechnik 66 (12), 1014-1026
F. Just, D. Gunz, J. Duarte, D. Simonetti, R. Riener, G. Rauter
Improving Usability of Rehabilitation Robots: Hand Module Evaluation of the ARMin Exoskeleton
WeRob 2018: Wearable Robotics: Challenges and Trends, 80-84
F. Just, Ö. Özen, S. Tortora, R. Riener, G. Rauter:
external pageFeedforward Model Based Arm Weight Compensation with the Rehabilitation Robot ARMin
International Conference on Rehabilitation Robotics (ICORR).
F. Just, R. Riener, V. Klamroth-Marganska, G. Rauter:
Therapist-Oriented Design of the Rehabilitation Robot ARMin V
Swiss Medtech Day 2017
F. Just, K. Baur, R. Riener, V. Klamroth-Marganska , G. Rauter:
Motor Inertia Compensation of the ARMin Rehabilitation Robot
AUTOMED 2016
F. Just, K. Baur, R. Riener, V. Klamroth-Marganska, G. Rauter:
Online Adaptive Compensation of the ARMin Rehabilitation Robot
Conference on Biomedical Robotics and Biomechatronics (BioRob), 2016
F. Just, K. Baur, R. Riener, V. Klamroth-Marganska, G. Rauter:
Improving Usability and Acceptance of Arm Rehabilitation Robotics: Development of ARMin V
Biomechanics and Neural Control of Movement, (BANCOM) 2016
F. Just, K. Baur, R. Riener, V. Klamroth-Marganska, G. Rauter:
Increasing Usability of Rehabilitation Robots: Development of ARMin V
Swiss Medtech Day 2016
F. Just, G. Rauter, R. Riener:
Enhancing robotic arm rehabilitation through intelligent interaction between the patient, the therapist, and the rehabilitation robot
Max Planck Workshop on Learning Control, 2015
F. Just, A. Waeber, N. Gerig, K. Baur, V. Klamroth-Marganska, P. Wolf, R. Riener, G. Rauter:
Expanding Upper-Arm Stroke Rehabilitation with ARMin to Arbitrarily Complex Tasks
International Neurorehabilitation Symposium (INRS), 2015
R. Meyer, F. Just, R. A. DeCarlo, M. Zefran, M. Oishi:
external pageNotch Filter and MPC for Powered Wheelchair Operation under Parkinson's Tremor.
(ACC 2014) American Control Conference (ACC), 2014