ANYexo

ANYexo is a versatile 6-DOF upper-limb exoskeleton based on low-impedance torque controllable series elastic actuators. This experimental platform is designed to validate novel algorithms and hardware concepts for more autonomous therapy of moderately and severely affected patients with a neural impairment.
Contact
Hardware
The kinematic design is optimized to achieve a large range of motion (ROM) to include all relevant activities of daily living with particular emphasis on body proximal movements. The robot is built for right arm use and adjustable to 5th percentile female to 95th percentile male population. The robot covers the shoulder complex with five joints and the elbow with one joint.
The links are built in lightweight design and the chosen actuators (ANYdrives by ANYbotics, Switzerland) provide accurate and robust joint torque control to best mimic the compliant and accurate haptic interaction of therapists. This link and joint design allows to use inverse dynamics for feedback linearization of the system dynamics, promoting high performance control strategies. At all contact points the robot measures the interaction forces to the human with 6-DOF interaction force sensors (Rokubi EtherCAT by Bota Systems, Switzerland).

Software
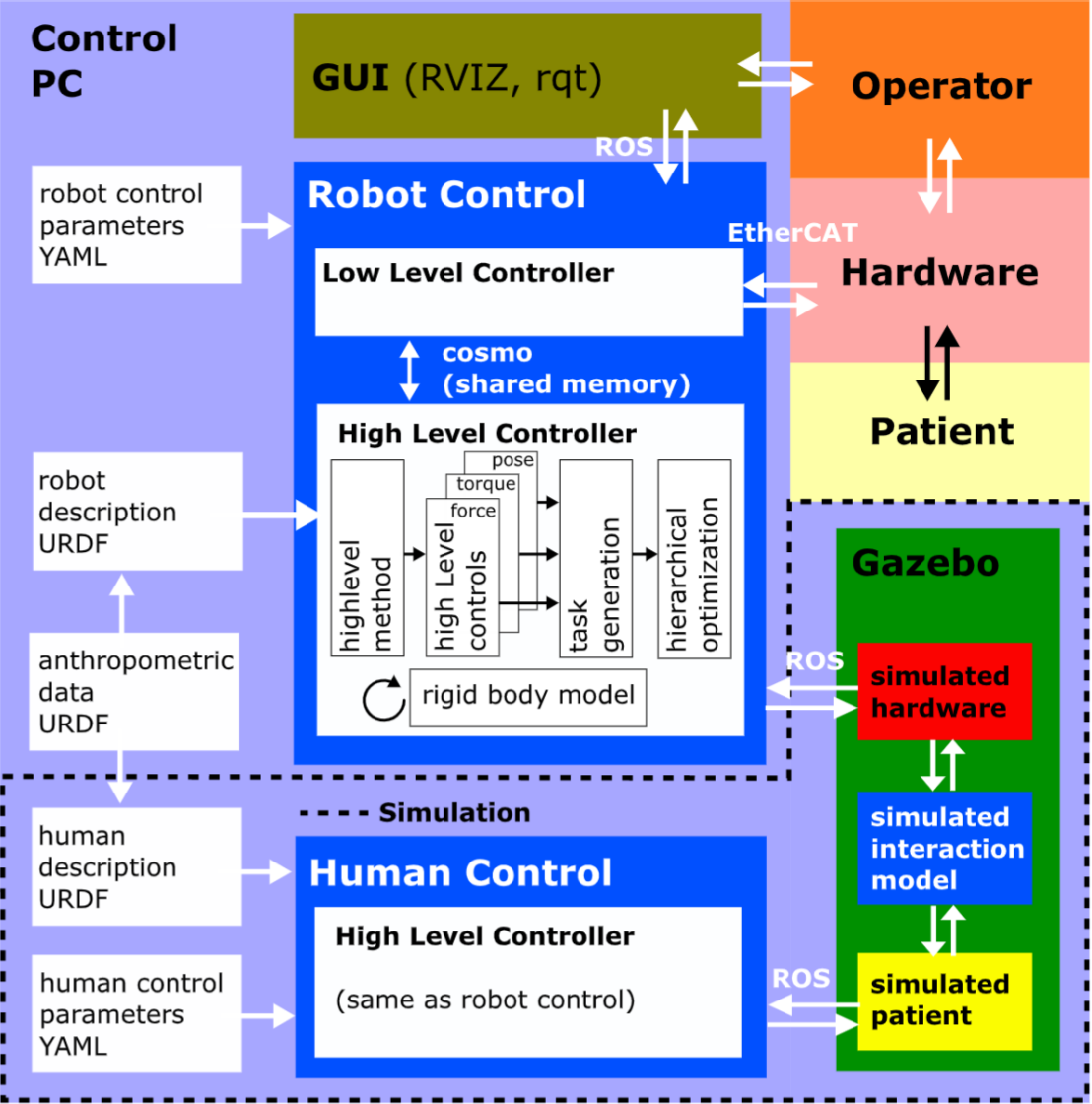
The robot joints can be used in position or torque control mode. One of the key elements of the robots control strategy is the use of hierarchical quadratic programming, that allows to optimally handle priorities within the complex set of tasks needed in a therapy session. For efficient development and testing of new software, we use a physics simulation (Gazebo) including the robot arm as well as a human arm.
Subprojects
Robust Interaction Force Control
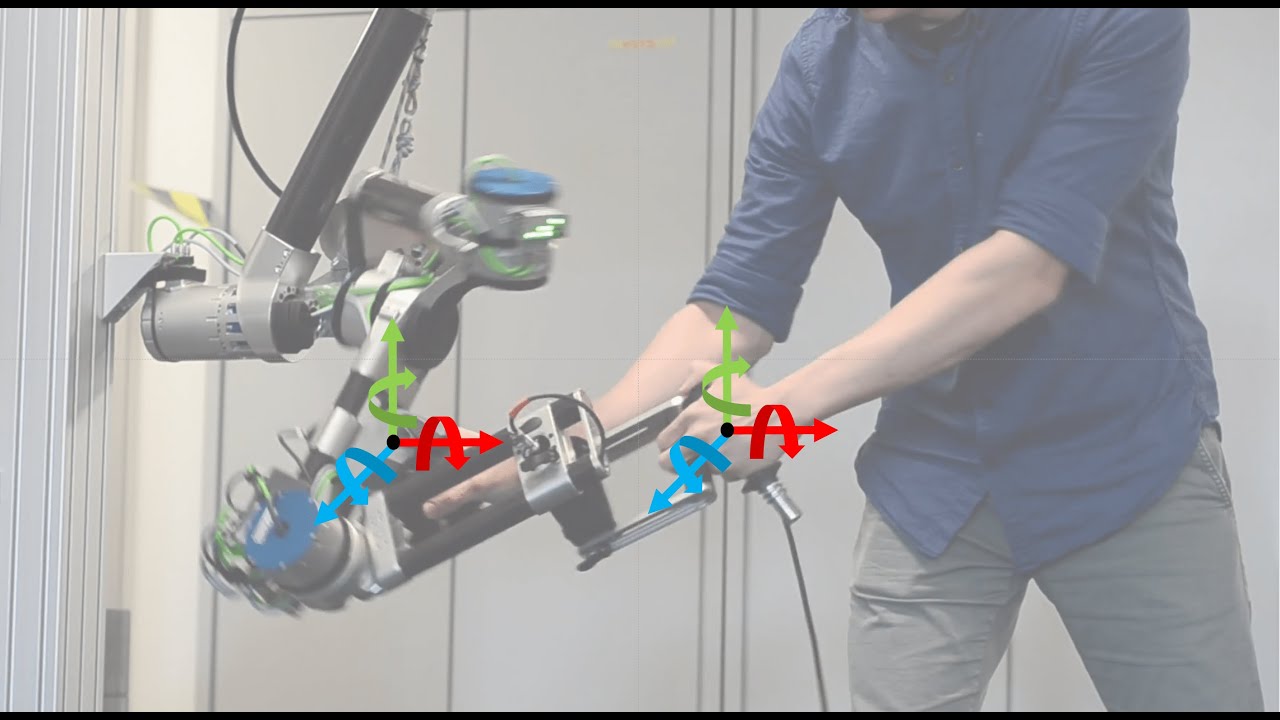
One of the main purposes of a rehabilitation exoskeleton is to assist or resist the movements of a patient arm with a dedicated interaction force. How can we control the robot to track this dedicated interaction force in the presence of dynamic movements of the human?
In our recent paper: "Towards Dynamic Transparency: Robust Interaction Force Tracking Using Multi-Sensory Control on an Arm Exoskeleton" (IROS 2020), we introduce a model and feedback-based control strategy to address this question. We can demonstrate a newbenchmark in haptic transparency for comparable rehabilitation robots.
We are carrying on the work on this topic investigating alternative control strategies to improvethe performance and integrating the force tracking controller into hierarchical task structures.
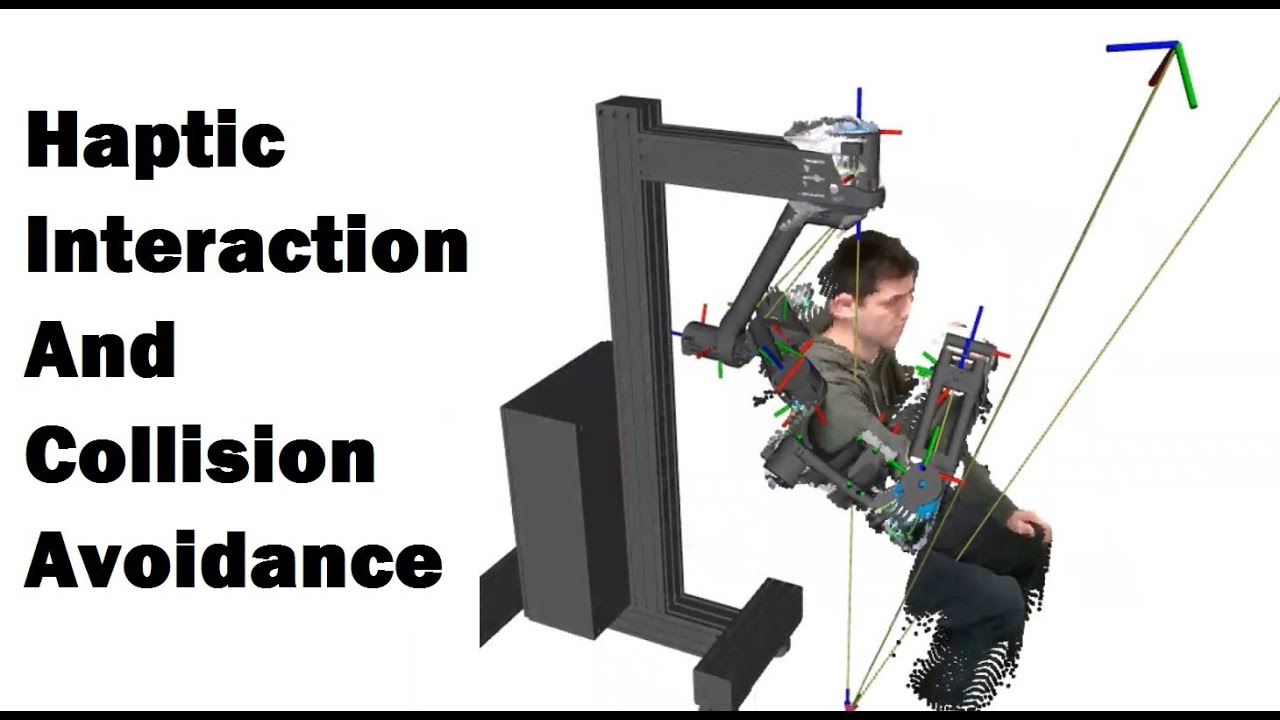
Collision Avoidance
Interaction with the own body is highly beneficial from a therapeutic point of view. However, during robot-assisted therapy of hemiplegic patients, interaction with the patient must be intrinsically safe, which is a challenge for body proximal movements. We overcome these seemingly contradictory objectives by combining haptic rendering techniques with classical computer vision methods.
Development of advanced physical human robot interfaces
Improved attachments of torso and arm
We are analysing the requirements for the design of the contact points using numeric simulations. The gained insight is used to improve the attachment design regarding usability, performance and comfort.
Orthosis to support the scapula movement
We developed an orthosis concept that stabilizes and supports the scapula in its physiological movement pattern.
