SIESTA
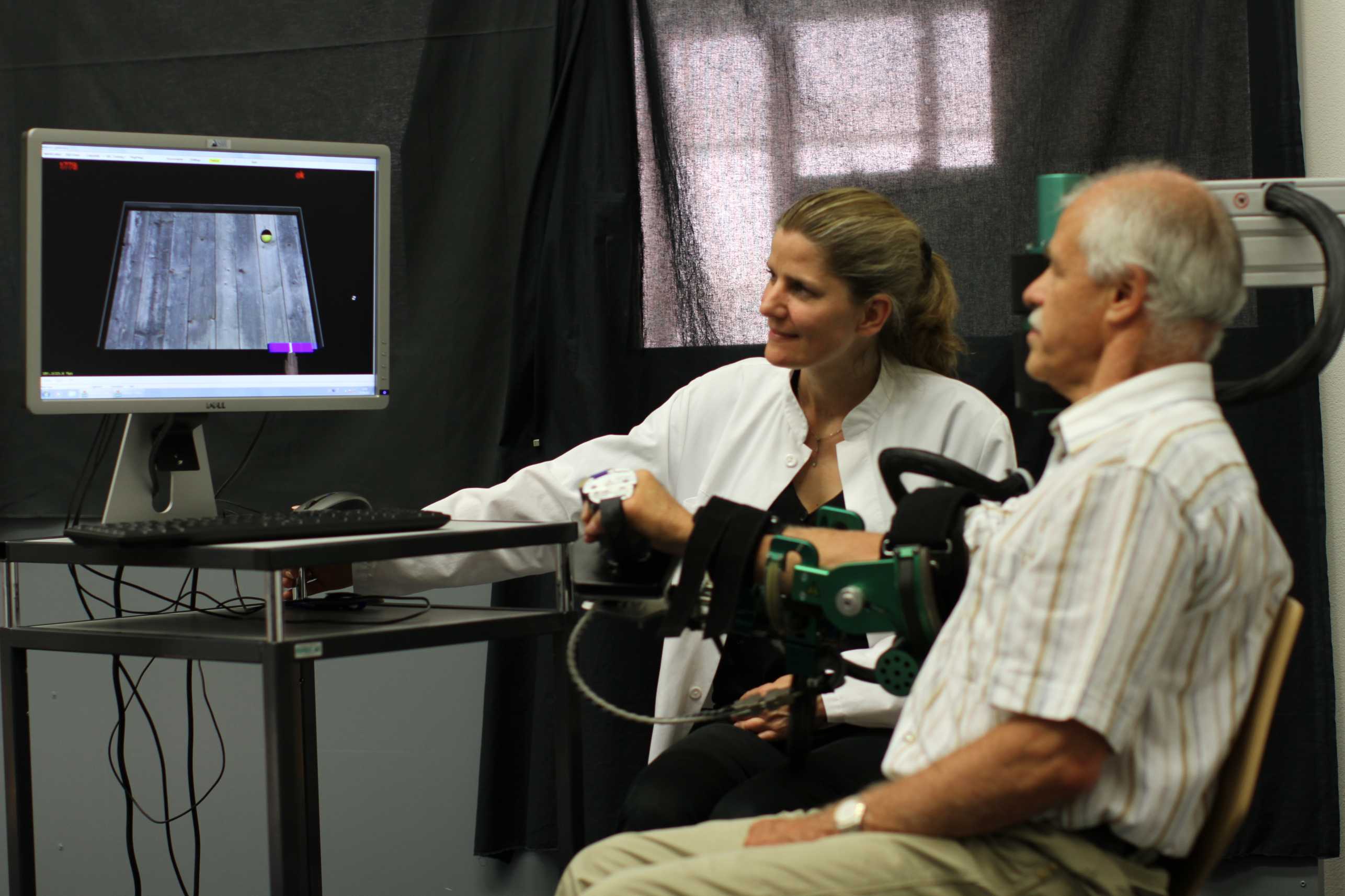
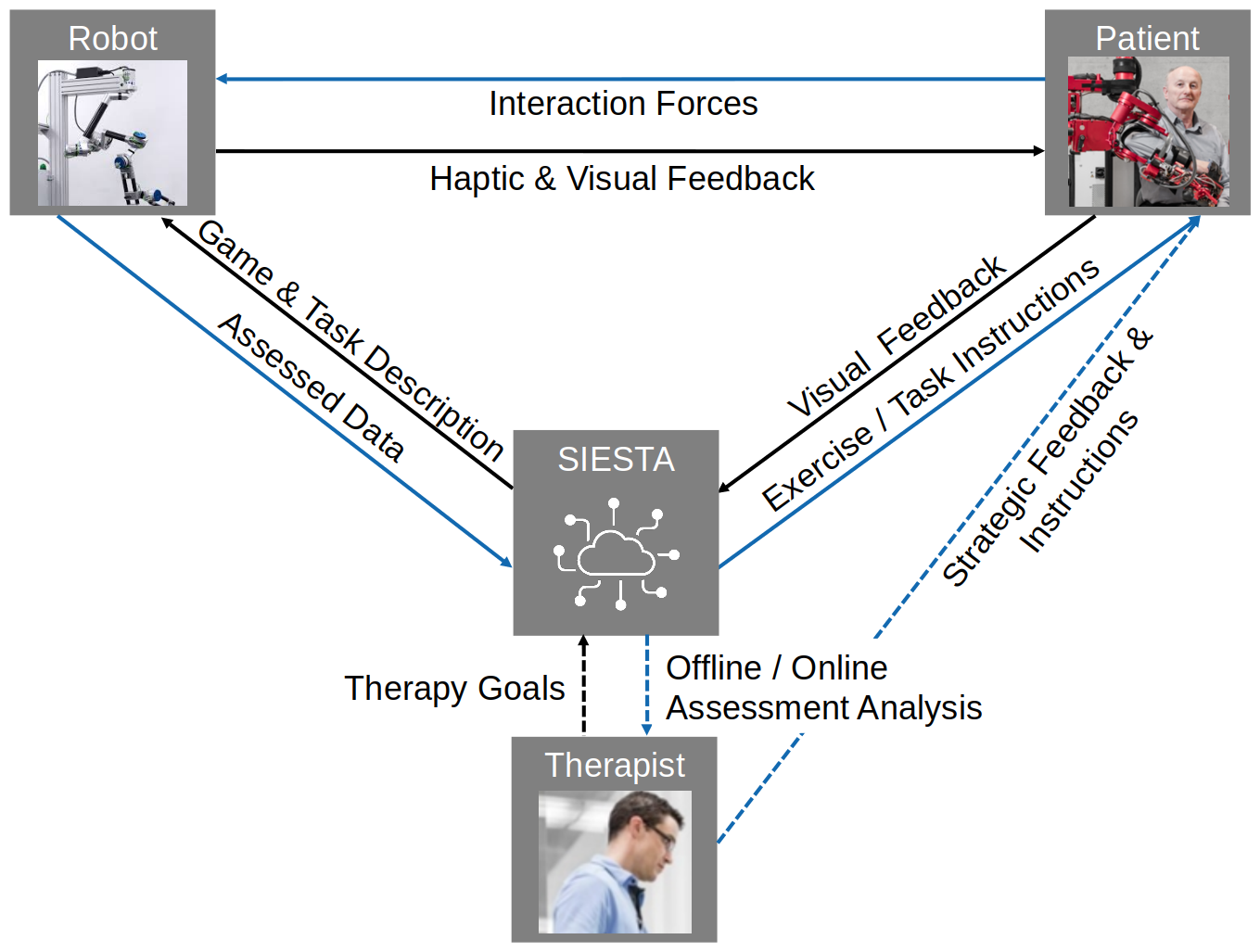
“Strategic Interaction of the Expert will improve the automated Selection of Task and Assistance” is our reply to the questioned socio economic efficiency of current robot-assisted therapies in clinics. By developing novel therapy strategies that streamline the therapist’s time and expertise, we improve the information flow between patient, robot and therapist:
Contact
Iterative Assistance as Needed: Assistance given to the patient differs in modality, type and amount. Beside non-physical assistance like instructions, commands or augmented visuals, we differentiate between non-active physical support (e.g. gravity compensation), and active physical support such as tunnel controllers. To provide the patient with individualized support, we strive to develop novel controllers that iteratively adapt the assistance.

Game and Task Generation: We aim to find optimal control strategies to automate the selection and generation of serious tasks that provide high intensity training, while simultaneously challenging and motivating the patient. Conventional kinematic assessments, such as active range of motion, or movement smoothness, show great potential for more accurate, real-time measurement of the patient's progress. However, they simultaneously introduce a challenge when comparing results and deducing the patient's performance improvement over multiple measurements: High standardization of tasks is necessary to avoid significant bias in the results. On the other hand, variability in tasks prove to be more challenging and motivating for the patient, with the result of increasing the overall training intensity.

Strategic Feedback & Instructions: Giving feedback to the therapist and providing parameters to set therapy goals generates a feedback loop that helps to eliminate bias from modelling errors in the robot-patient system. The therapist can especially compensate for errors coming from missing psychological information such as motivation, focus, or personal therapy preferences. We investigate these effects and look for significant correlations between patient ability scores and therapist’s decision strategies.

Language Translation: While a robot can be provided with clear instructions such as goal positions and trajectories, therapists think more in terms of therapy goals such as activities of daily living, movement-related medical scores, and psychological goals. To exploit the full potential of both the robot and the therapist, we strive to improve the communication between the two agents by investigating different translational methods and concepts.